LABORATORIO VIRTUAL DE MECATRÓNICA
Análisis de la cadena cinemática
de un robot SCARA RS40
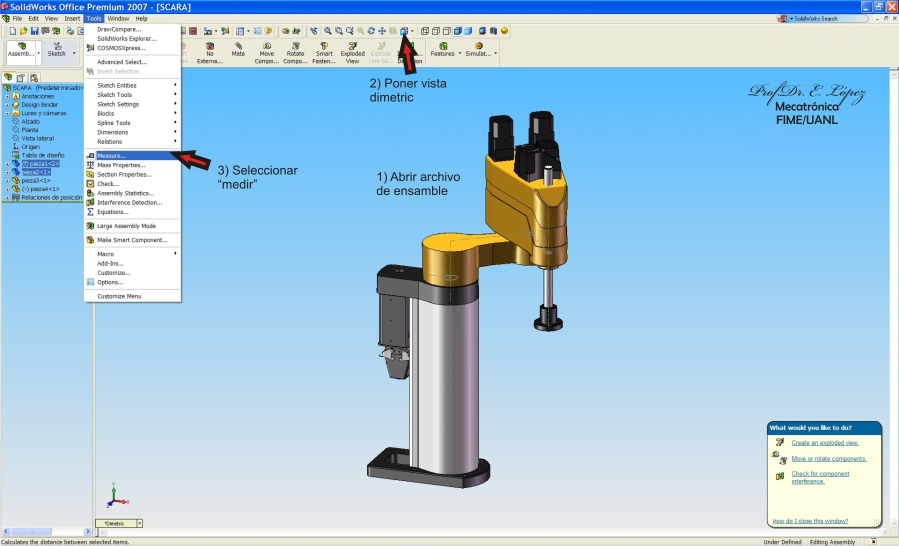
- Paso #1
Abra el archivo "SCARA.SLDASM" SolidWorks
2007 Assembly Document. Este archivo contiene la cadena cinemática
de un robot tipo SCARA RS40, preparado para que usted pueda fácilmente
editar la posición, calcular los valores de rotación y traslación,
observar el TCP, etc. El robot tiene un enlace interno a una
tabla de diseño de EXCELL, en donde cada vez que el archivo
se graba, la tabla de diseño se actualiza con las nuevas posiciones.
Esta tabla de diseño se utilizará posteriormente como entrada
de datos a una hoja de MathCAD en donde usted podrá
probar las ecuaciones y los cálculos de la cadena cinemática.
Seleccione la vista dimetric, a alguna otra que usted considere cómoda
para poder ver el "esqueleto" formado por líneas auxiliares.
No haga ninguna operación que altere el diseño, ni tampoco mueva
los miembros del robot. Observe en la base del robot el origen de coordenadas
representado por los vectores XYZ como flechas de colores Roja-Verde-Azul
(RGB).
Seleccione medir (Measure) del menú de herramientas (Tools). Aparecerá
el cuadro de diálogo de mediciones.
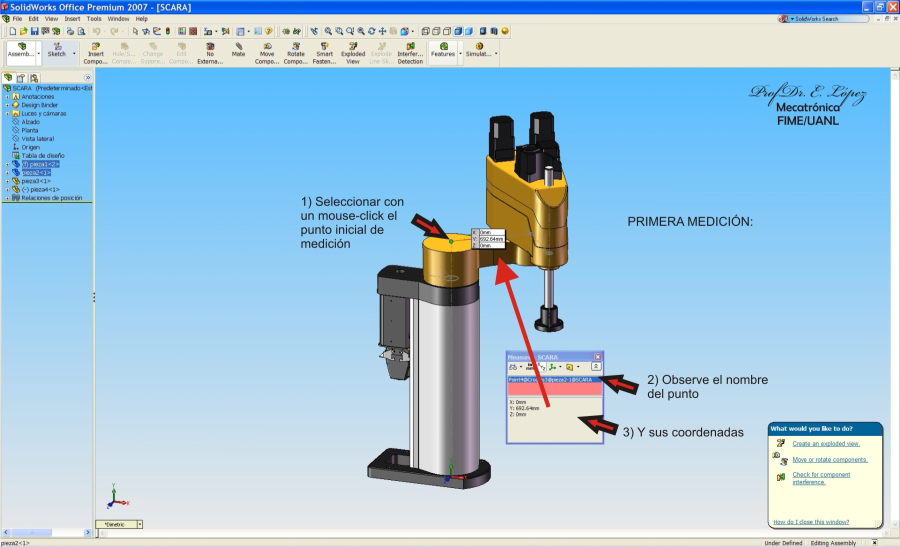
- Paso #2
La primera trasnformación es una traslación de dos segmentos,
la cual puede ser medida seleccionando el punto final según se muestra
en la figura, En el cuadro de diálogo se actualizan las mediciones
de la entidad (en este caso las coordenadas del punto). Este cuadro de diálogo
modificará el tipo de información de acuerdo a la selección
de medición.
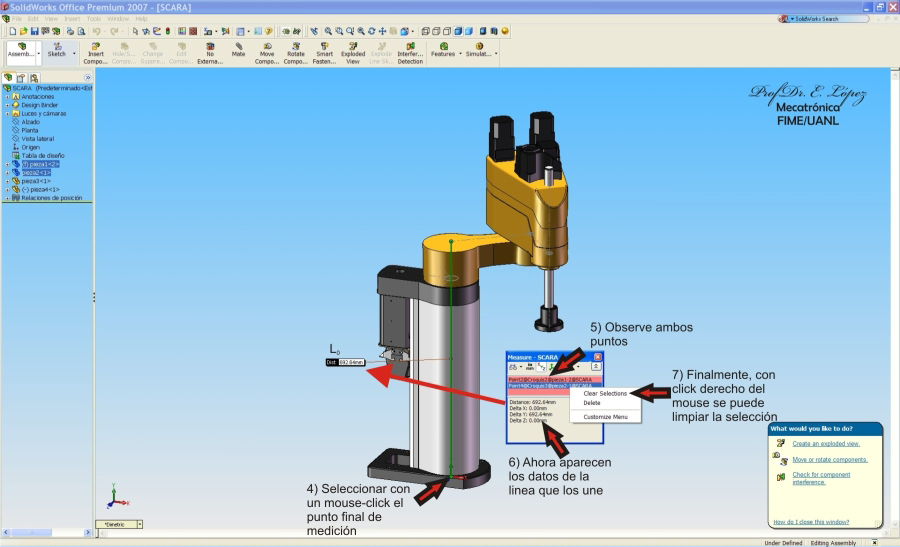
- Paso #3
Seleccione el punto final de medición. La información
del cuadro de diálogo de mediciones se actualizará. Tome nota
de la longitud de desplazameinto: 692.64. Nótese
que seleecionar rectas permite medir distancias.
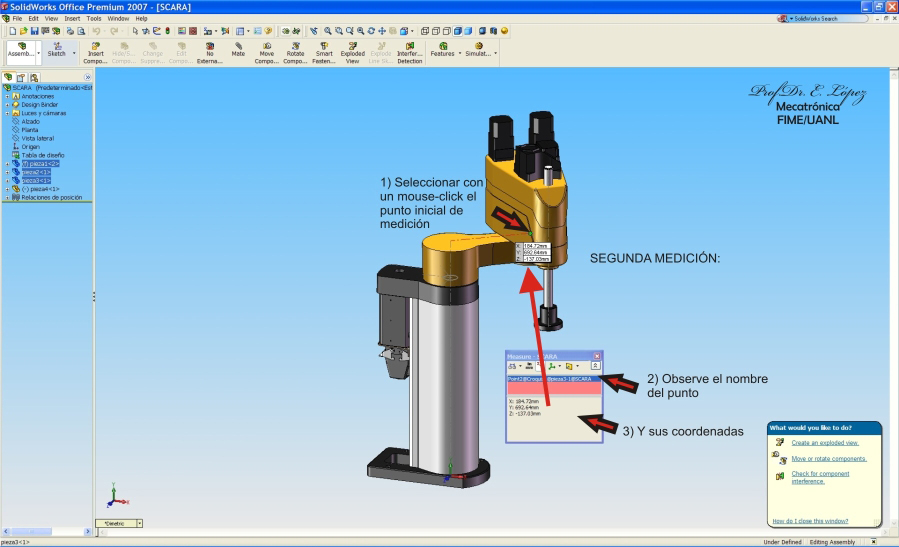
- Paso #4
Haga lo mismo con el punto inicial de la siguiente recta de traslación.
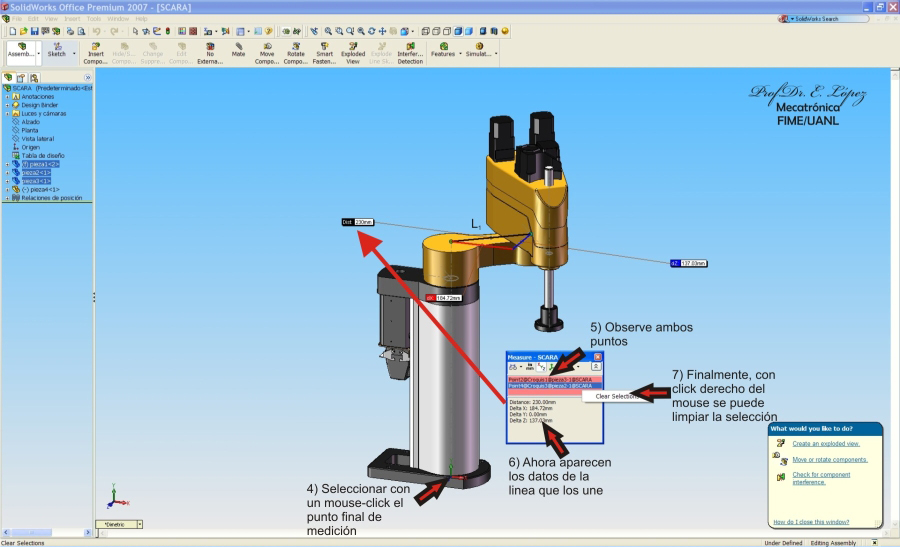
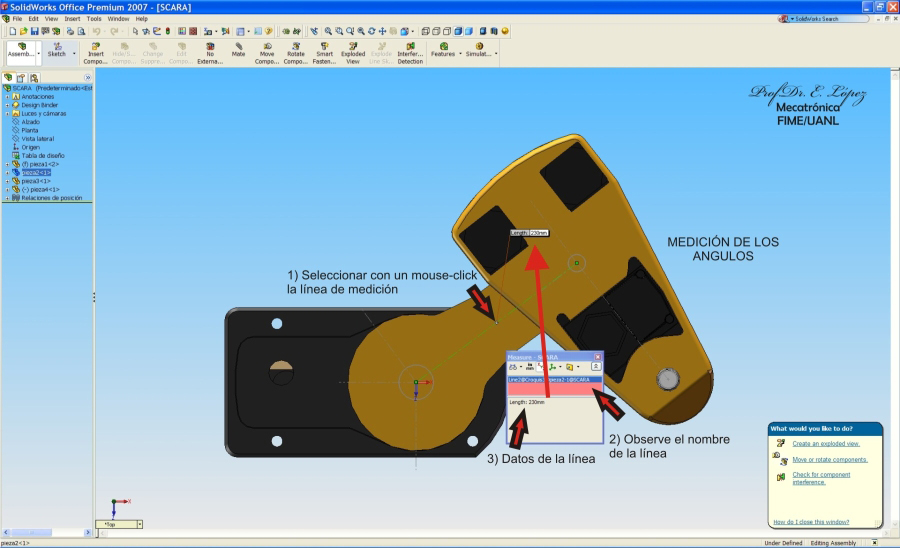
- Paso #5
Y con el punto final de la siguiente recta de traslación. Tome
nota de la longitud de desplazamiento: 230.00
- Paso #6
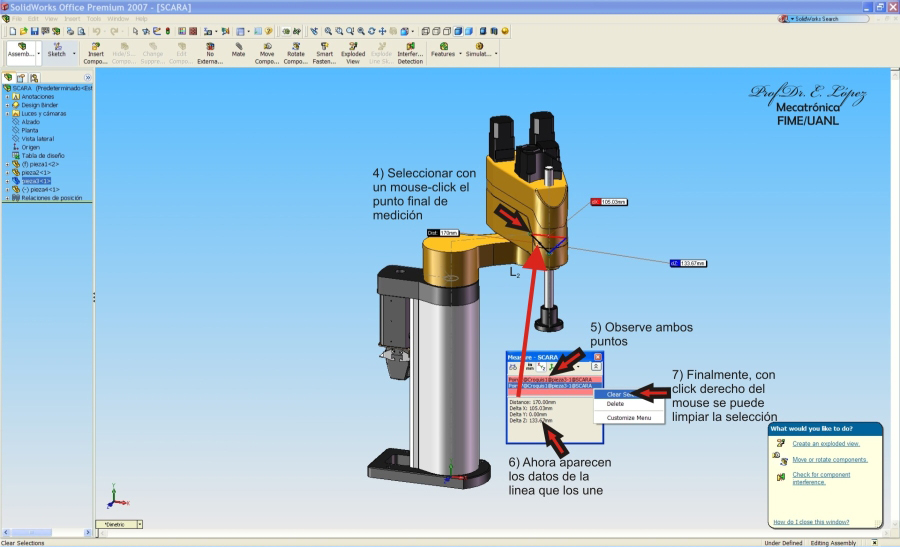
Repetir los pasos con el siguiente miembro de la cadena.
- Paso #7
Y revisar el valor de la traslación.
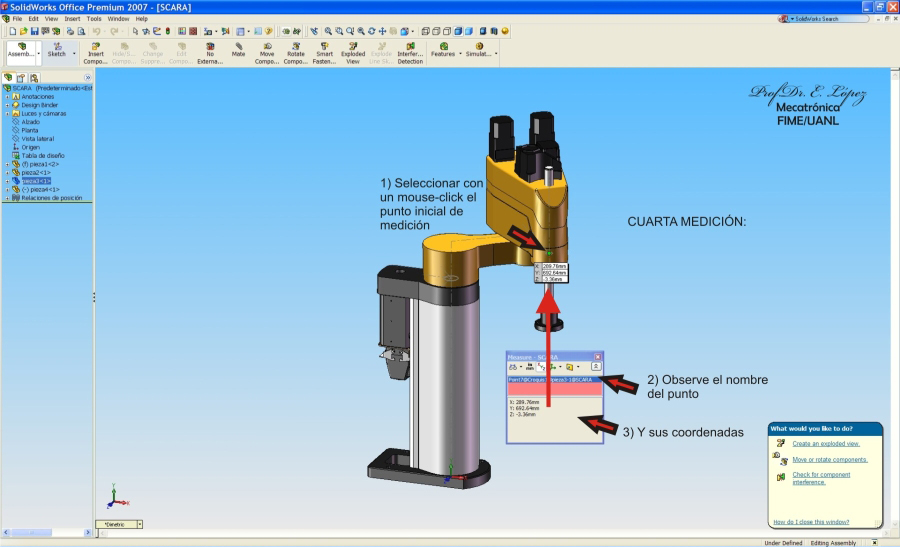
- Paso #8
Igual que en los pasos anteriores. Observe que el valor de esta traslación
no es una constante del sistema, a diferencia de las anteriores las cuales
son valores fijos de construcción,
ésta tiene dependencia de la posición de traslación del
eje Z del robot!
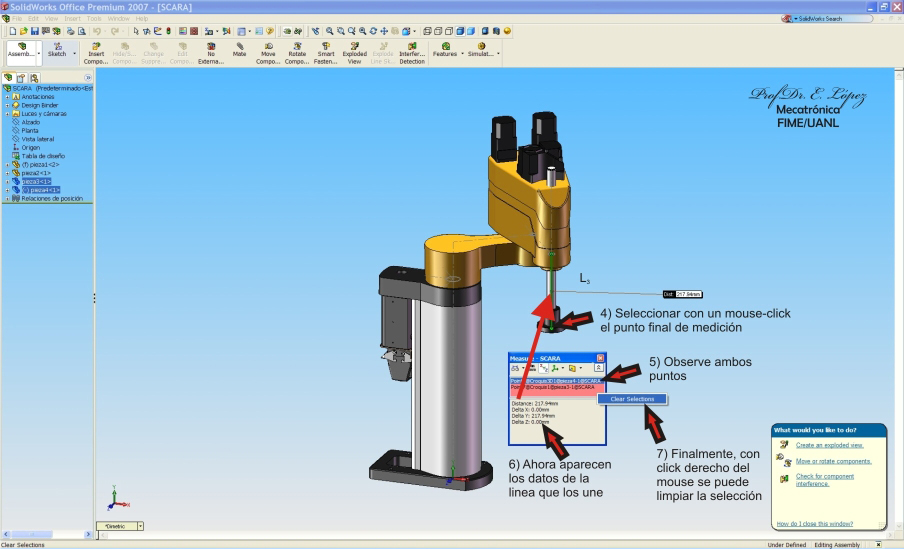
- Paso #9
La medición en esta posición ejemplo es de -217.9
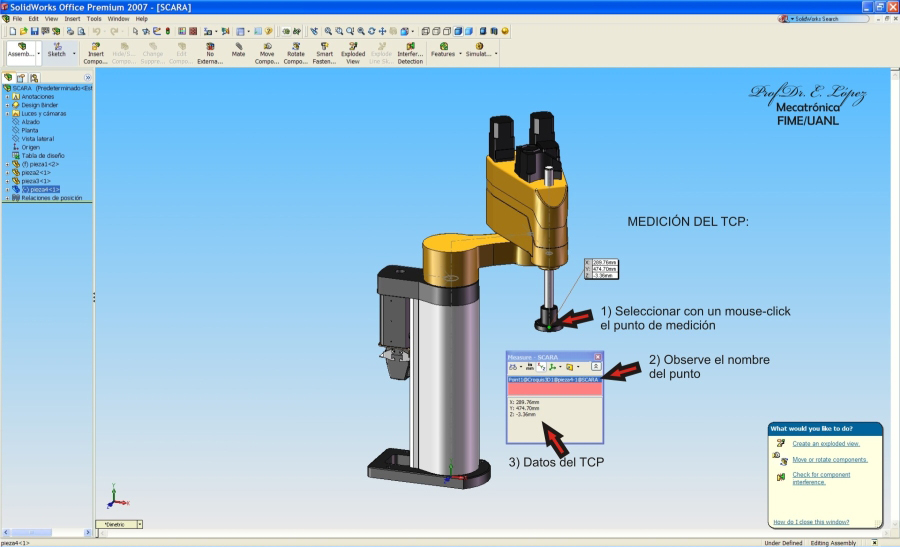
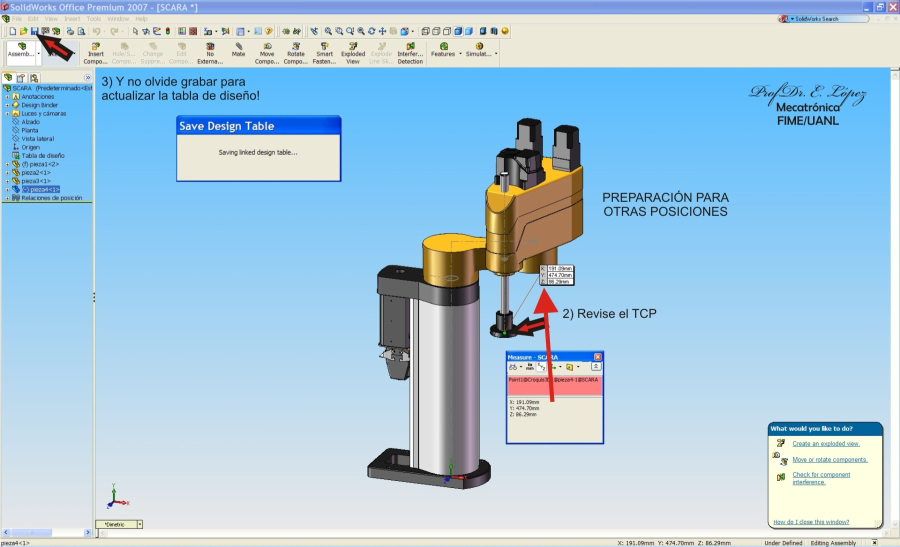
- Paso #10
Y el valor del TCP para esta posición es de
(209.76, 424.70, -3.36)
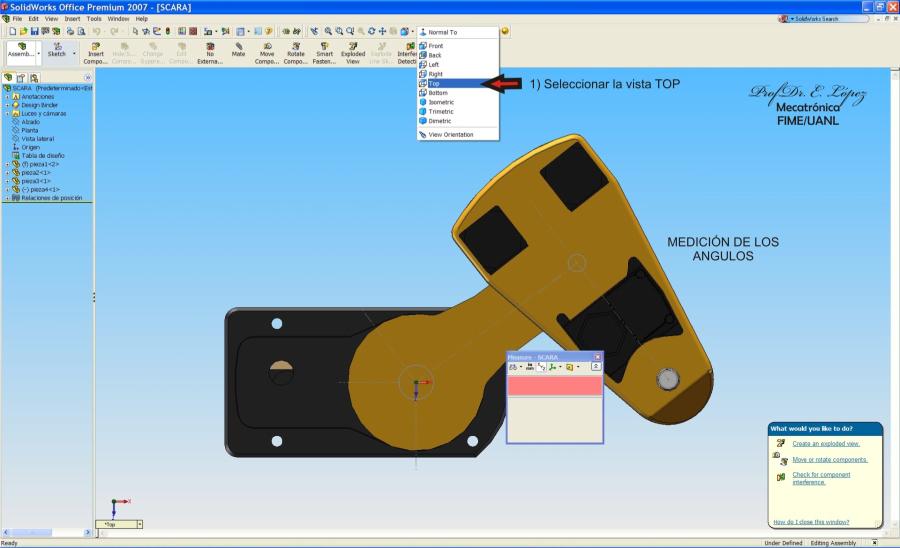
- Paso #11
Ahora se procede a medir los ángulos.Seleccione para ello la
vista superior (Top).
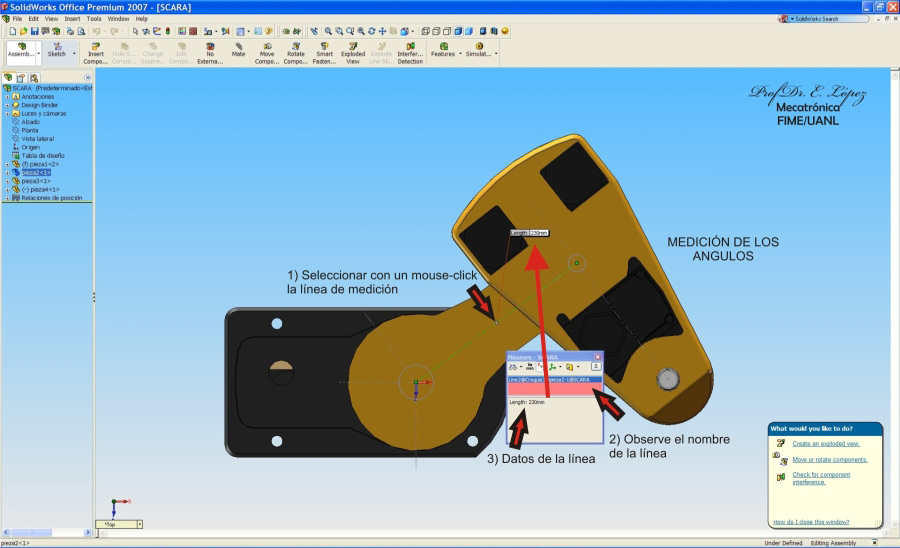
- Paso #12
Mida la primera recta. Observe el cuadro de diálogo de mediciones.
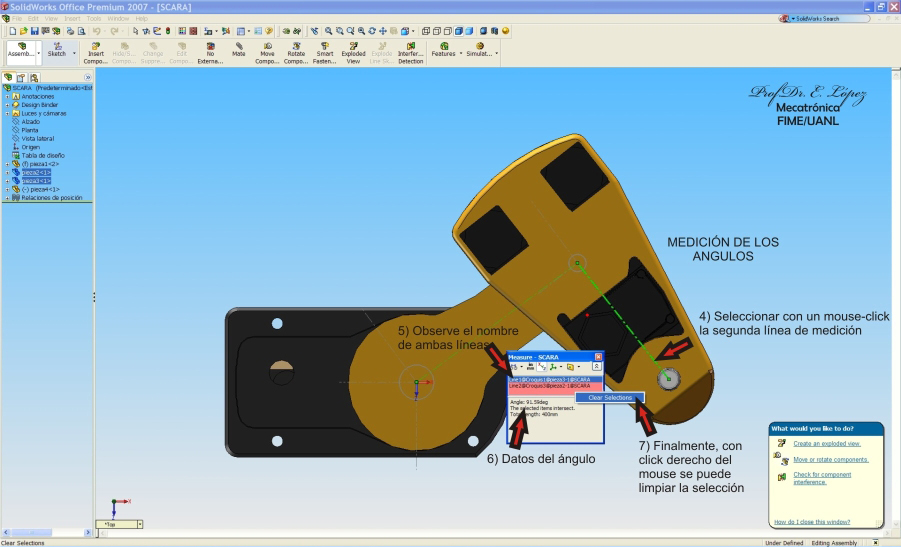
- Paso #13
Mida la segunda recta. El cuadro de diálogo mostrará
el valor angular de la articulación dos: 91.59
grados.
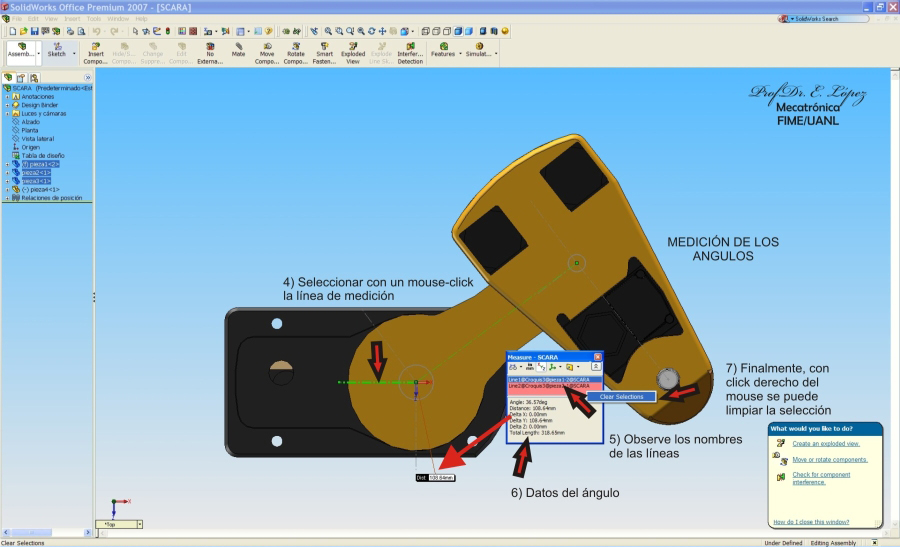
- Paso #14
Finalmente mida la recta auxiliar de la articulación uno. Observe
el cuadro de diálogo; el valor angular de la articulación uno
es de 36.57 grados. Ahora
ya fueron medidos todos los valores necesarios para que usted compruebe los
cálculos de posición de SolidWorks y MathCAD.
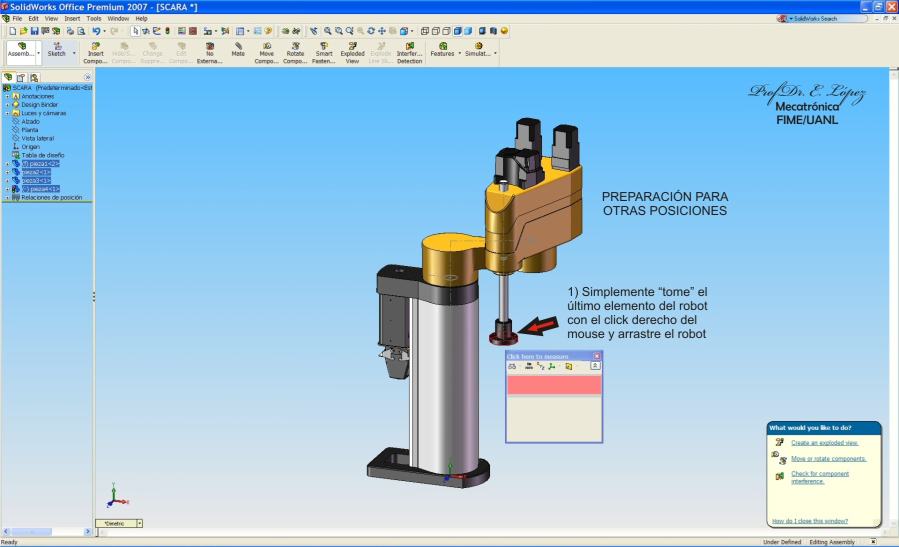
- Paso #15
Si desea repetir los pasos con otra posición, solamente "tome"
el último miembro de la cadena y "arrástrelo". Recuerde
que mientras no grabe el archivo, la Tabla de Diseño (Design Table)
de Excell no se actualizará.
- Paso #16
Para cada posición deberá tomar los valores angulares
y el TCP de nuevo!
- Paso #17
Cuando todo esté listo, simplemente grabe
y la tabla de diseño de Excell se actualizará (no modifique
con Excell esta tabla, pues contiene información oculta que relaciona
el esqueleto del robot con las celdas).
- Paso #18
Abra ahora el archivo de MathCAD "SCARA.mcd".
Los valores de la tabla de diseño son leídos en la variable
RyT (Rotaciones y Traslaciones). Compruebe las
ecuaciones y el resultado del TCP.
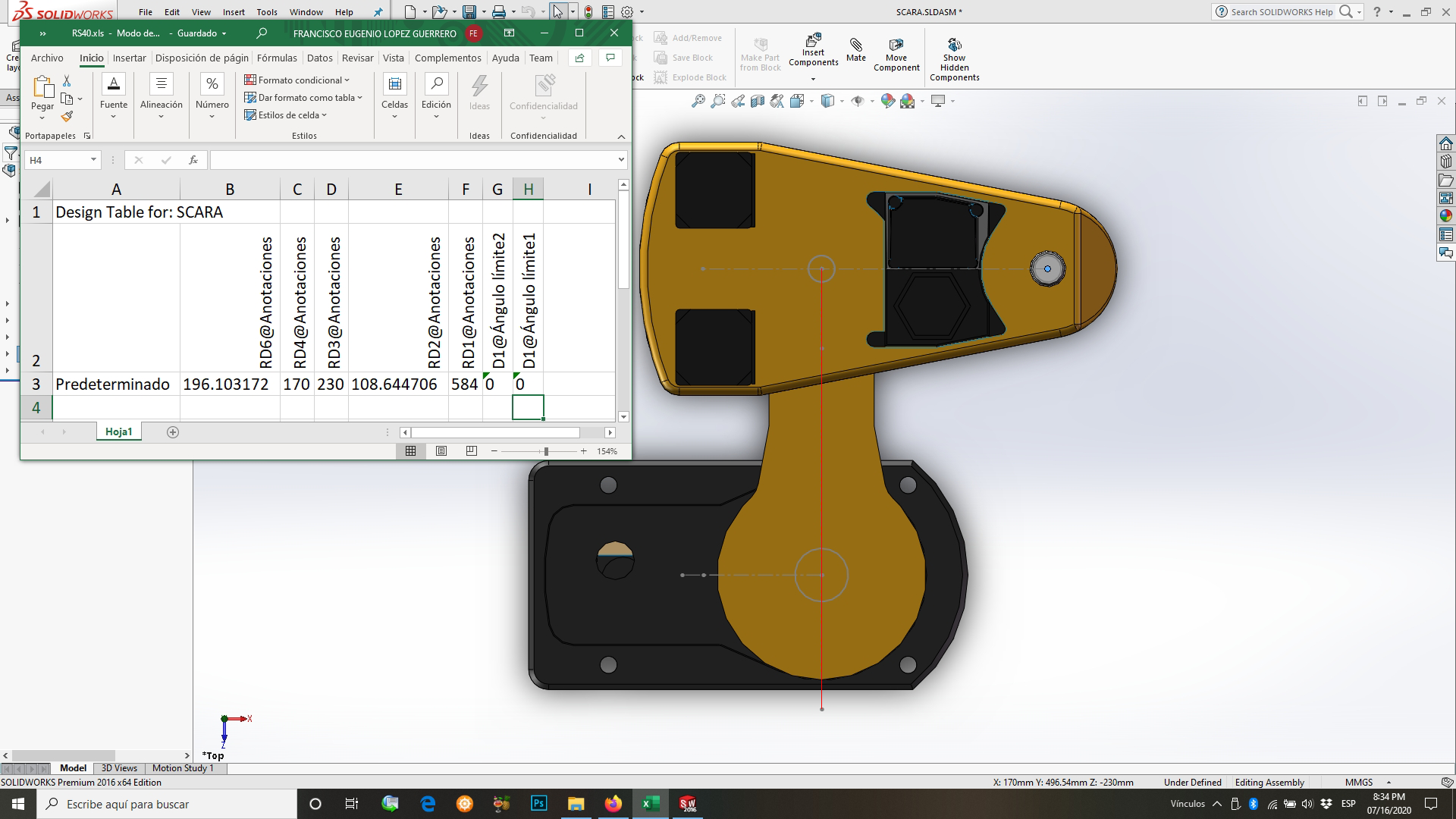
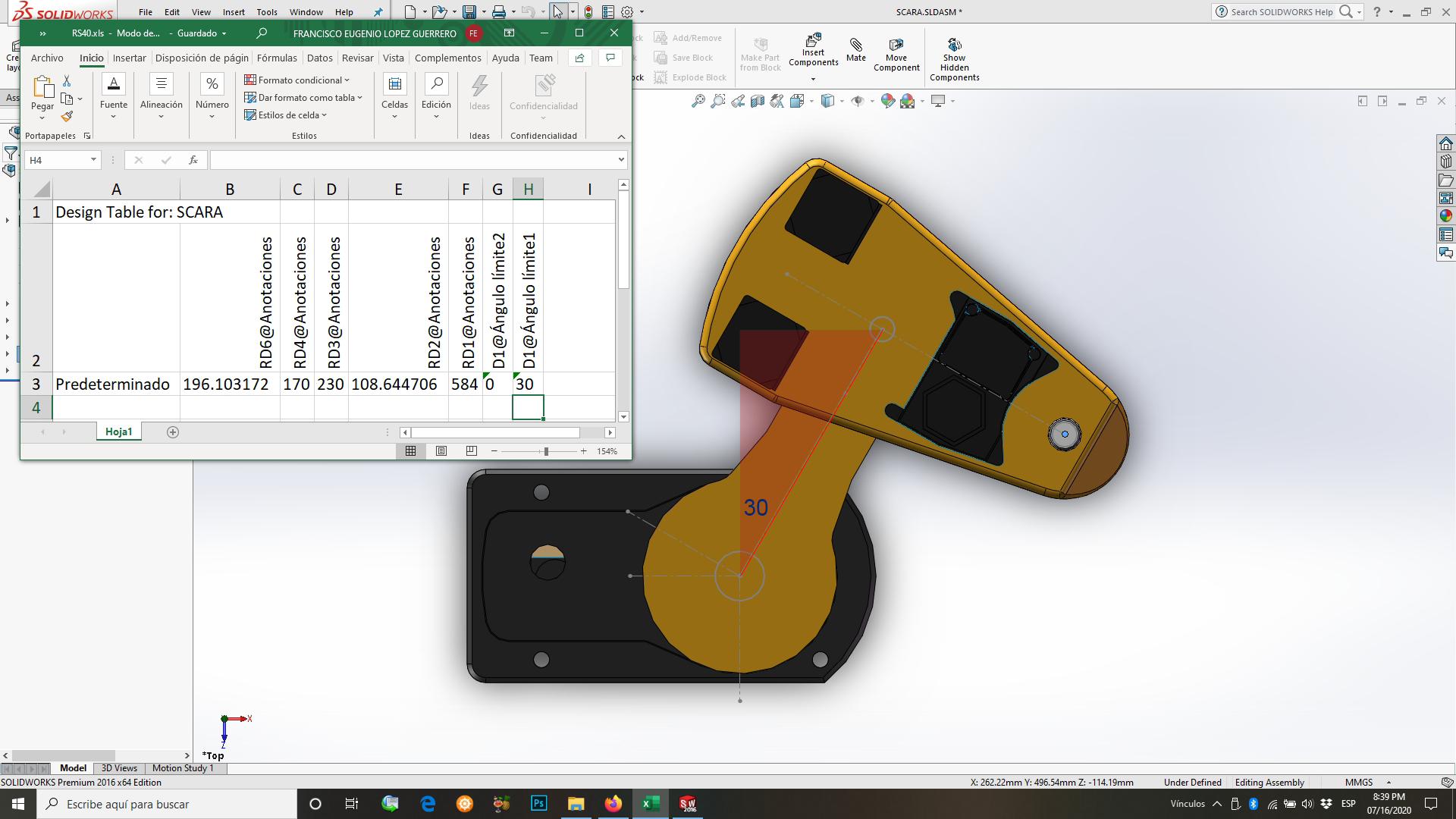
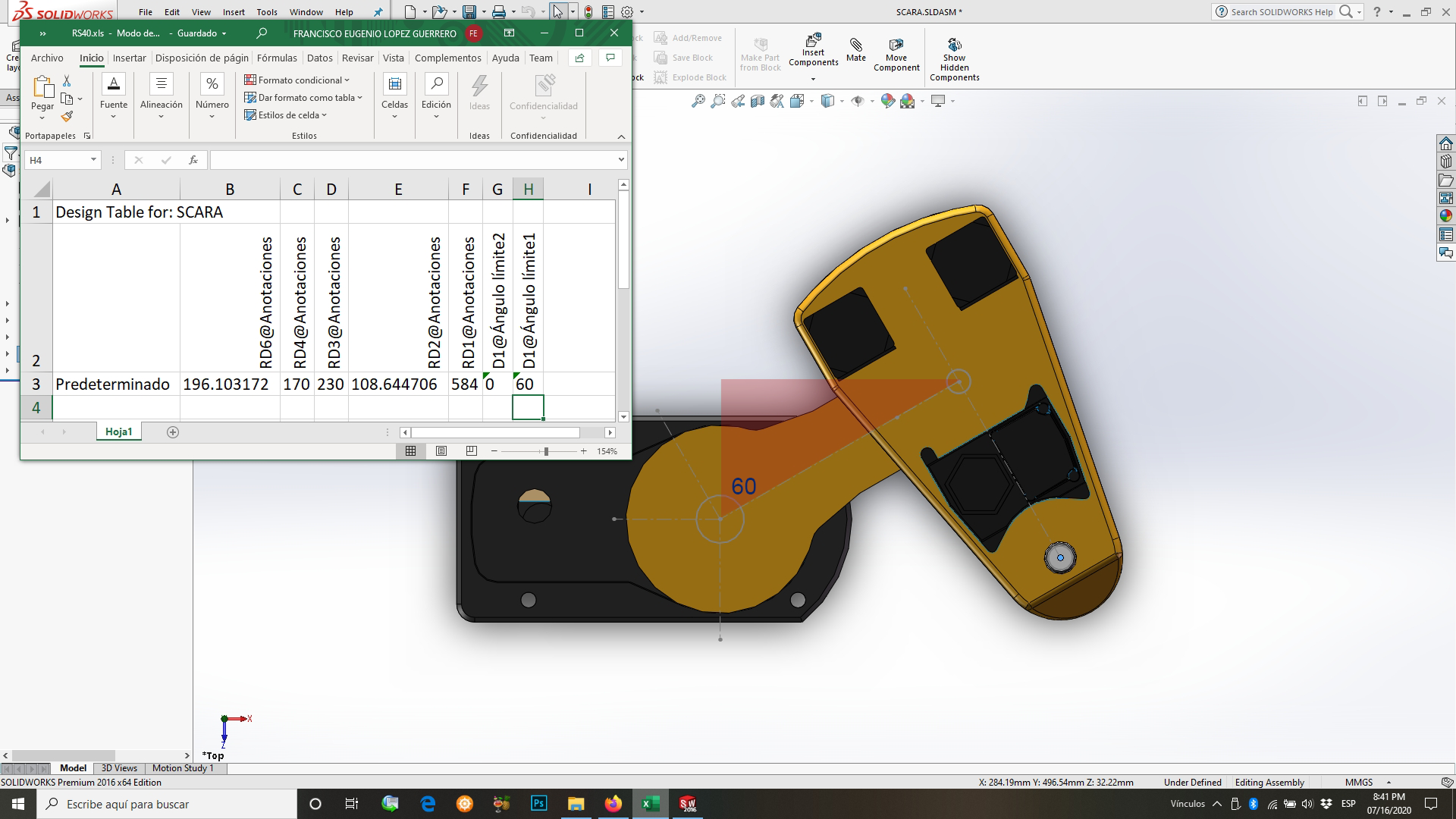
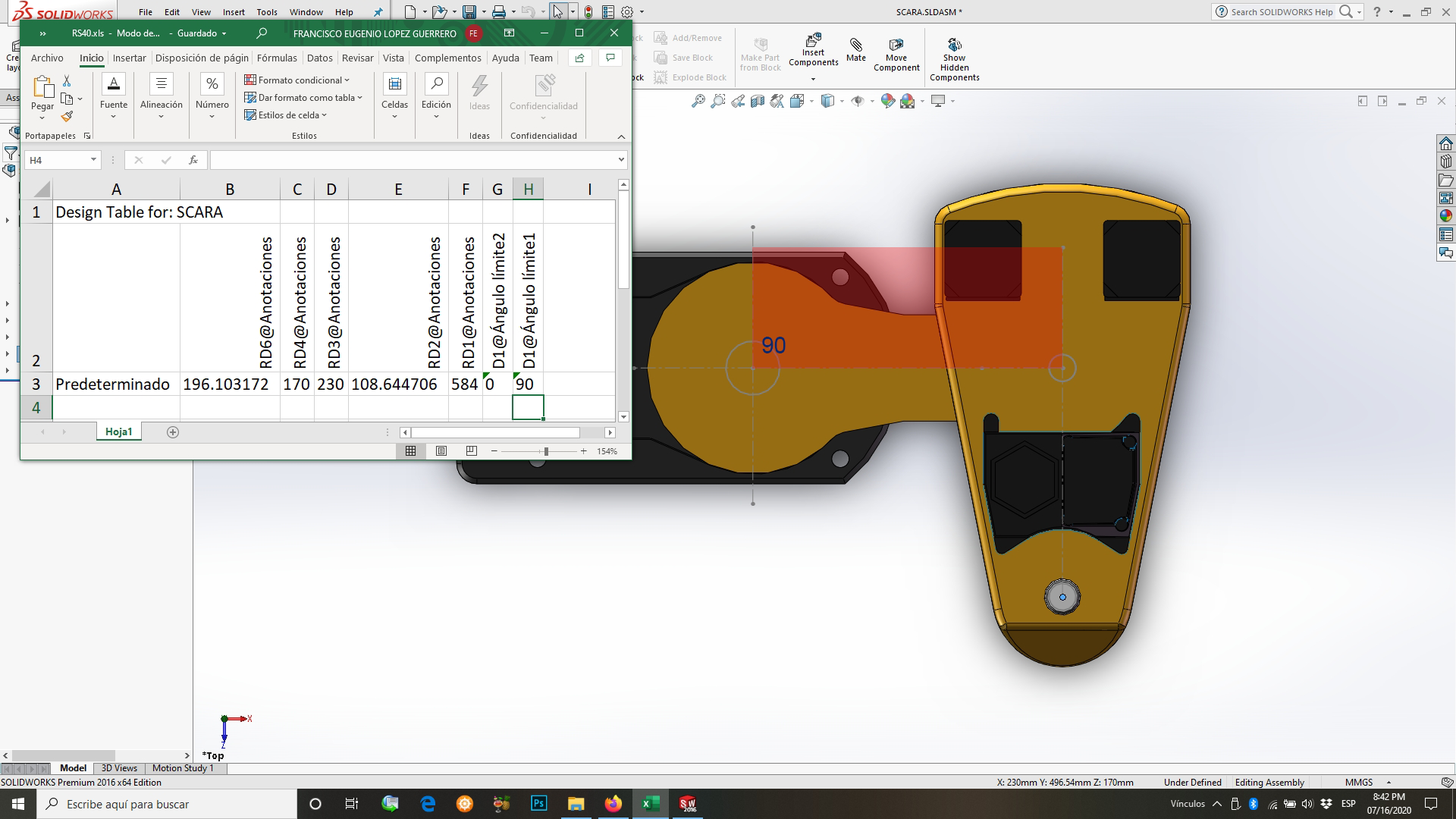
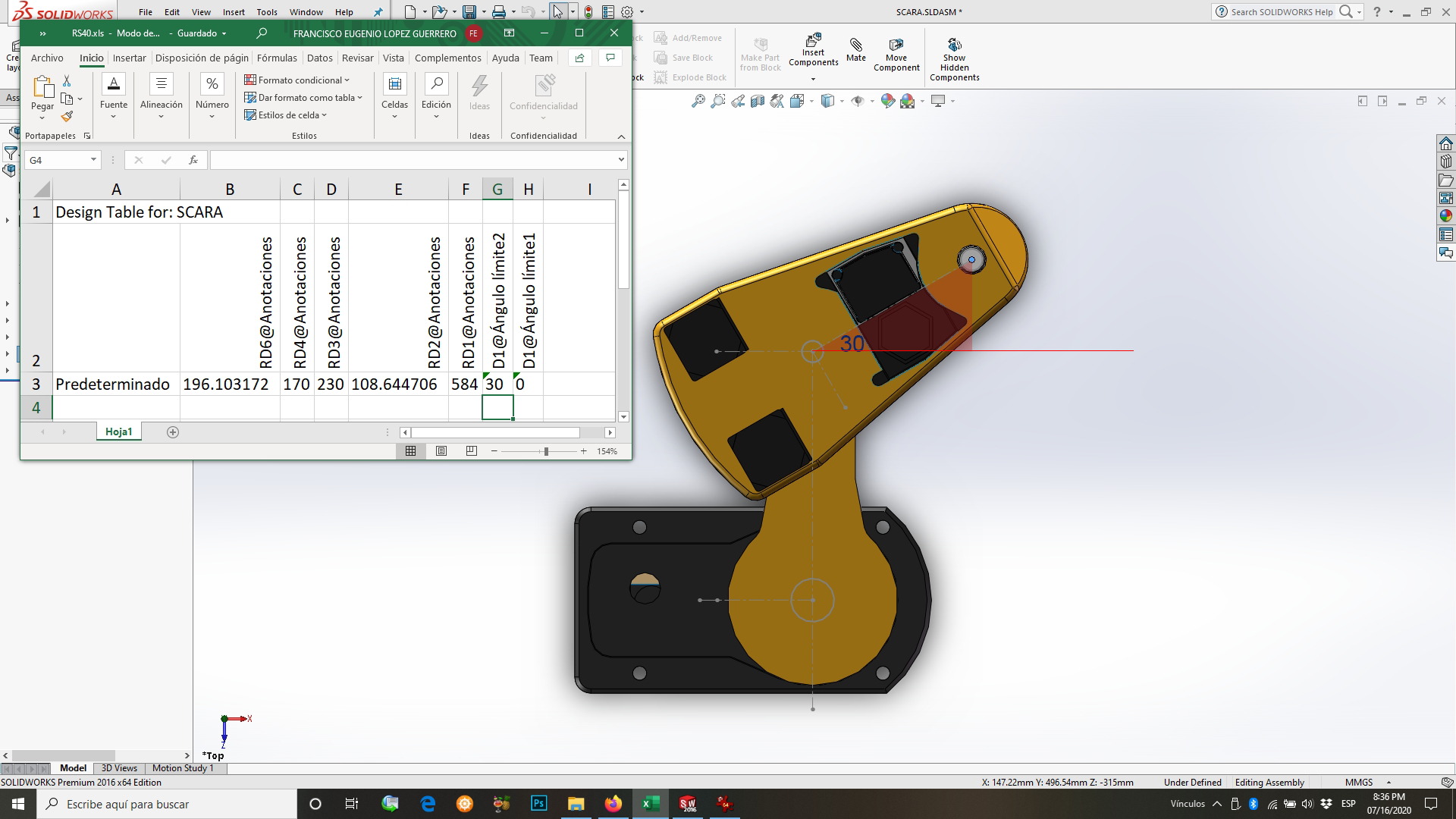
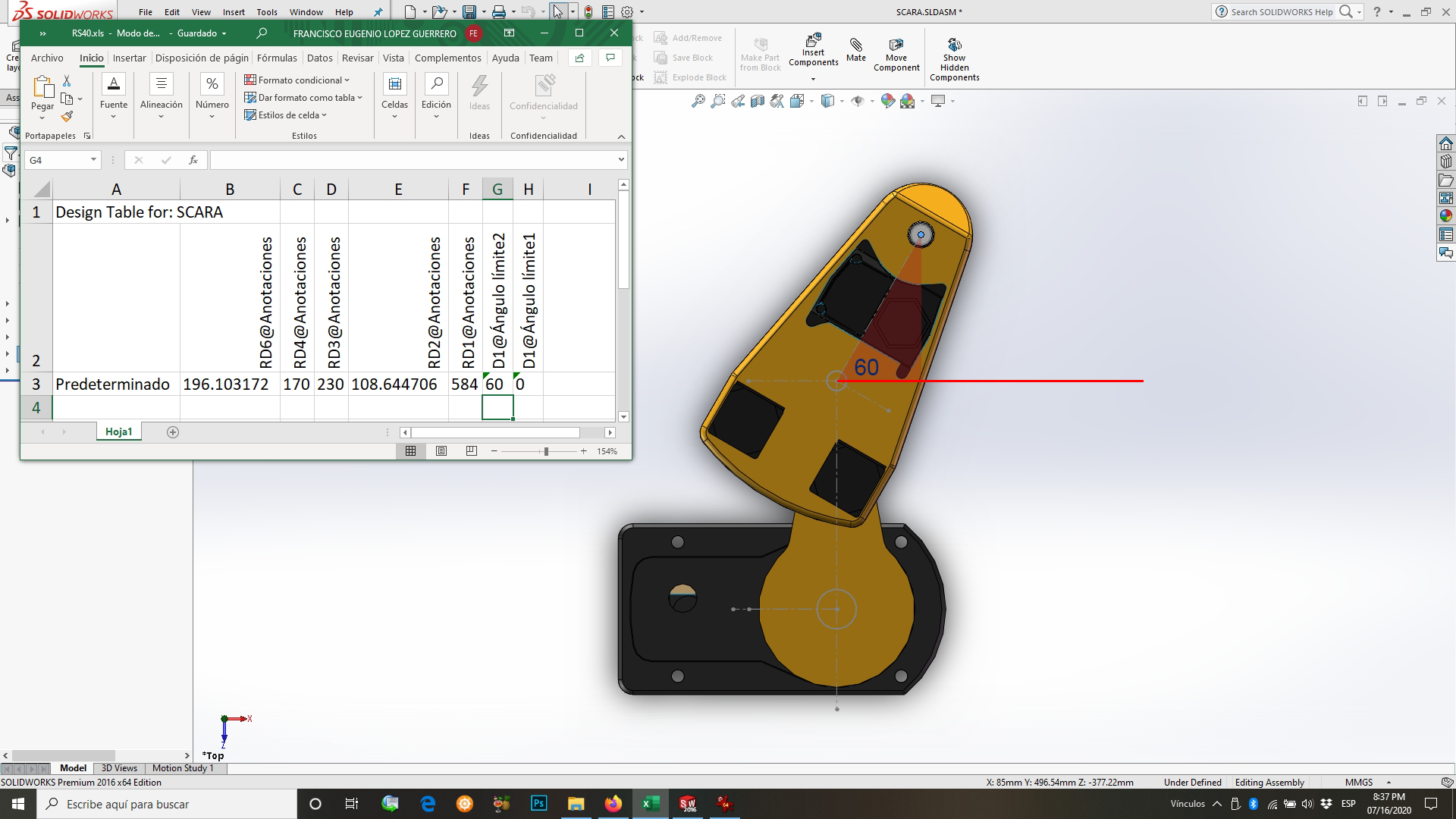
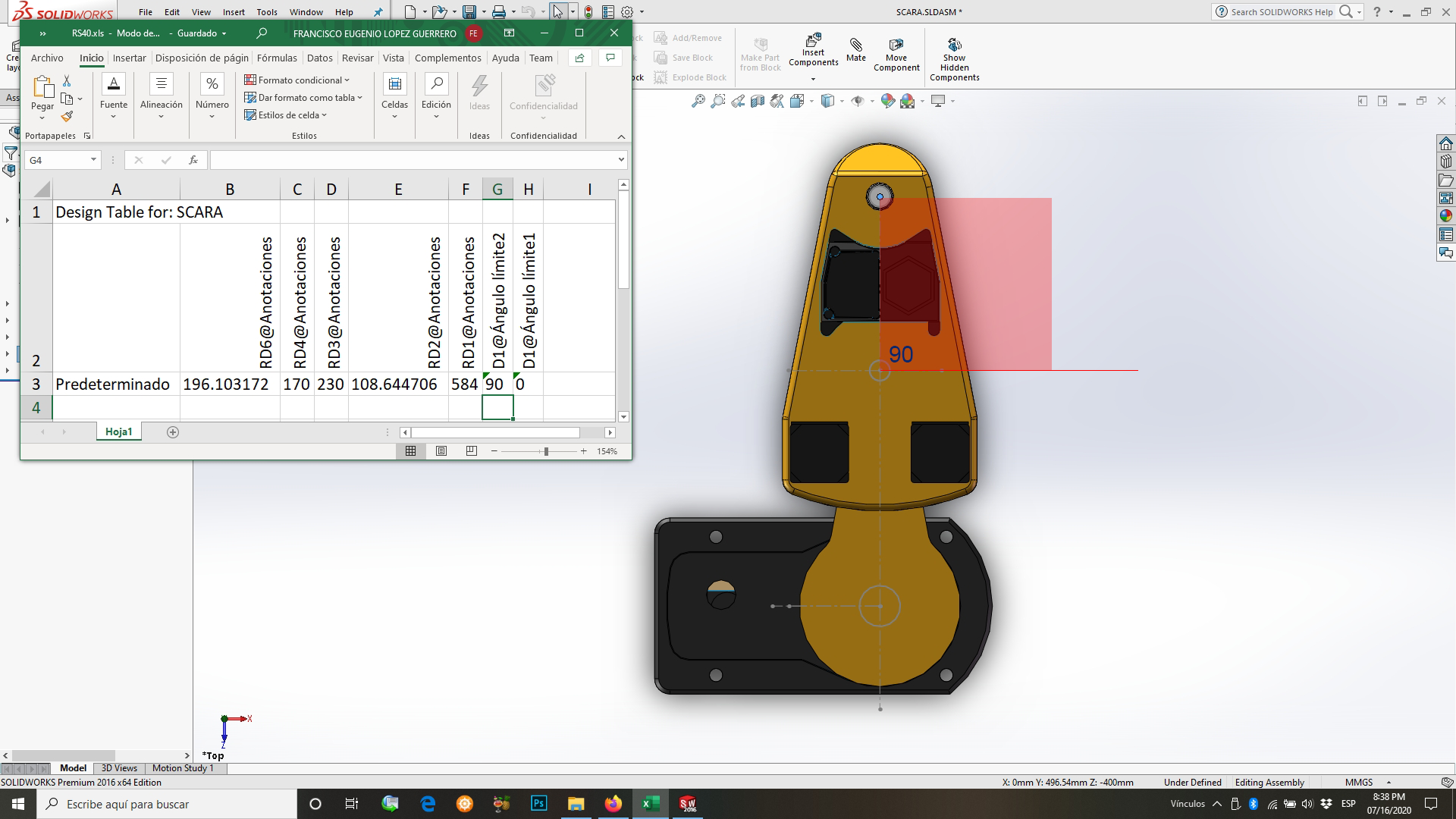
- Observe cómo Solidworks almacena los ángulos en la tabla de diseño. Haga click en las siguientes figuras para ver cotas y referencias angulares:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}